 実験の記録
Record
実験の記録
Record
2026年6月3日 水曜日
令和8年度宇宙AIロボット開発講座「スタートアップ講座」を行いました!
日 程:令和8年5月23日(土)、24日(日) 9:00~16:30
場 所:教育総合研究所
参加者:県内高校生・中高一貫中学校生 計45名
講 師:船瀬 龍 東京大学大学院工学系研究科航空宇宙工学専攻 准教授
青柳 賢英 福井大学学術研究院基盤部門産学官連携本部 准教授
山城 陽二郎 東京大学 船瀬・五十里研究室スタッフ
福田 一弥 東京大学 船瀬・五十里研究室スタッフ
中田 龍良 東京大学 船瀬・五十里研究室スタッフ
協賛団体:公益財団法人げんでんふれあい福井財団
協力企業・団体:株式会社ナカテック、株式会社ネスティ、鯖江精機株式会社、
サンエー電機株式会社、セーレン株式会社、春江電子株式会社、
ふくい宇宙産業創出研究会、三菱電機株式会社 (五十音順)
サポートスタッフ:サンエー電機株式会社スタッフ2名
セーレン株式会社スタッフ4名
春江電子株式会社スタッフ1名 (五十音順)
内 容:1日目 講演(宇宙開発について)、プログラミング講習、
ロボット(ローバー)製作
2日目 プログラミング講習、ロボット(ローバー)製作、模擬競技、
成果発表会
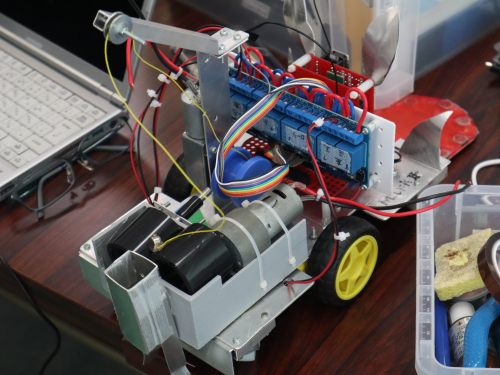
宇宙AIロボット開発講座の最初の講座であるスタートアップ講座が5月23日、24日に開催されました。宇宙AIロボット開発講座では、約1年間をかけて模擬火星探査ロボット(ローバー)の製作が行われます。スタートアップ講座では、ローバーの動作のもととなるコンピュータープログラムの基礎講習や、ローバーの動作状況を確認する模擬競技、2日間での製作の進捗状況および今後1年間の製作の展望などについて報告する成果発表会などが行われました。ローバーについては、前年度製作されたものが引き継がれて今年度の製作が進められるため、前年度メンバーからの製作物の内容の引き継ぎも行われました。受講生たちは、さまざまな場面で、東京大学と福井大学からお招きした講師の方々、および各協力企業のサポートスタッフの方々から直接指導を受け、ローバー開発に対する理解を深めていました。
1日目
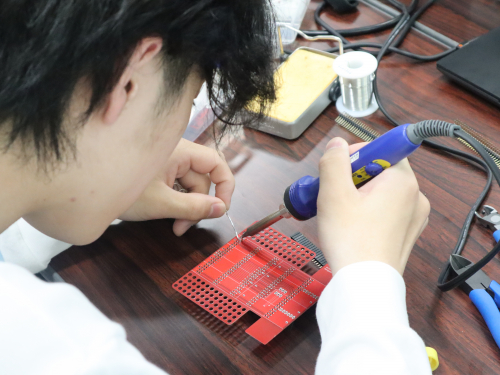
最初に、宇宙分野で最前線に立って開発を進めている東京大学の船瀬准教授から、宇宙開発への挑戦やAIロボットに関する講演がありました。次に行われたプログラミング講習では、コンピュータープログラムの基本構造について解説が行われました。受講生たちは、LEDを点灯、消灯させる電子回路および電子プログラムを作成して、プログラミングに関する理解を深めました。わからないところが出てきたときは、講師や企業サポートスタッフの方々が丁寧に解説してくれました。その後、ローバー製作やローバー動作の調整が行われ、その際に、ローバー構造や動作プログラムなどに関する前年度メンバーからの引き継ぎも行われました。みな試行錯誤しながら積極的に活動に取り組んでいました。



2日目
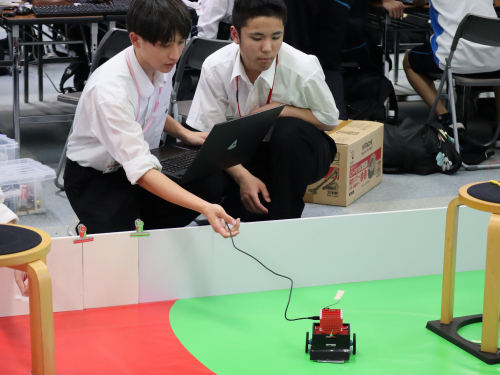
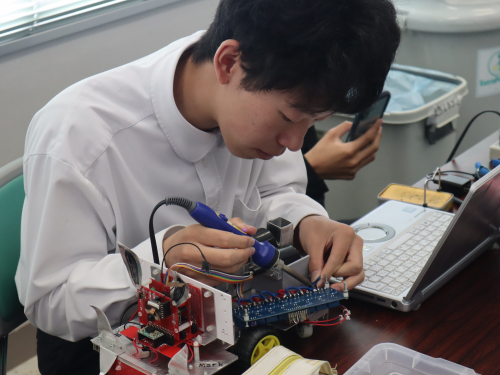
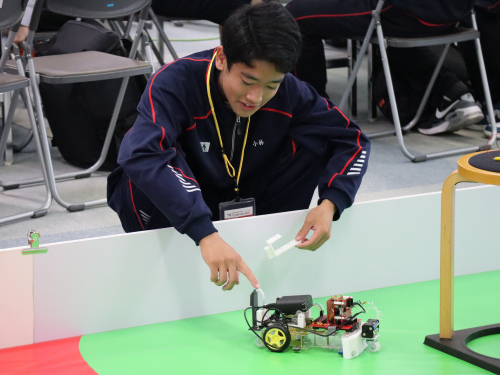
まず始めに、プログラミング講習が行われました。受講生たちは、サーボモーターを回転、停止させる電子回路および電子プログラムを作成し、自分たちの思い通りにモーターの動きを制御しました。また、ローバー動作のもととなる電子プログラムのシステム構造に関する解説も行われ、受講生たちはローバー動作に関する電子プログラムの複雑なシステム構造について理解を深めました。その後、製作したローバーの動作確認や機体調整が行われたのち、模擬競技が行われました。競技では、無線通信でPCからローバーを遠隔操作するチームや、カメラで取得した画像データによる物体認識でローバーの自律動作を目指すチームなど、それぞれのチームが独自の発想をもとにローバーを動作させて競技に臨みました。最後に成果発表会が行われ、ローバーにアームを取り付けてコンテストコースに設置されたサンプル物質の回収を目指すミッションや、コンテストコース床面の色のマッピングを利用してローバーを動作させるミッションなどが、各チームから発表されました。


受講生からは、「これからの未来でどんどん進化していく宇宙の開拓事業に関心を持ちました。」「先生たちの話がわかりやすくて素晴らしかったです!」「とてもためになった。これからの探究学習に生かして頑張りたい。」「プログラムの書き方を一から教えて貰えて、できる楽しさに気づくことができました。」「グループでわからないことを共有しあって問題を解決しようとすることの大切さを理解しました。」などの感想が得られました。
福井県教育総合研究所 サイエンスラボ
お問い合わせ 0776-58-2170
