 実験の記録
Record
実験の記録
Record
2025年5月26日 月曜日
宇宙AIロボット開発講座「スタートアップ講座」を行いました!
日 程:令和7年5月17日(土)、18日(日) 9:00~16:30
場 所:教育総合研究所 物理ラボ・生物ラボ
参加者:県内高校生・中高一貫中学校生 計42名
講 師:中須賀 真一 東京大学大学院工学系研究科航空宇宙工学専攻 教授
青柳 賢英 福井大学基盤部門産学官連携本部 准教授
望月 友貴 東京大学大学院航空宇宙工学専攻中須賀研究室スタッフ
山城 陽二郎 東京大学大学院航空宇宙工学専攻中須賀研究室スタッフ
特別協力団体:福井北ロータリークラブ
協力企業・団体:株式会社ナカテック、サンエー電機株式会社、セーレン株式会社、
春江電子株式会社、ふくい宇宙産業創出研究会、三菱電機株式会社
(五十音順)
サポートスタッフ:サンエー電機株式会社スタッフ2名
セーレン株式会社スタッフ2名
春江電子株式会社スタッフ2名(五十音順)
内 容:1日目 宇宙開発についての講義、プログラミング講習、
ロボット(ローバー)製作
2日目 プログラム作成、ロボット(ローバー)製作、ミッション作成、
成果発表会
5月17日、18日に宇宙AIロボット開発講座「スタートアップ講座」を開催しました。講座では、火星探査ロボットをイメージして、ロボット(ローバー)製作とロボット(ローバー)に書き込むプログラム作成を行い、最後に2日間での製作の進捗状況、チームごとに定めたミッション内容、および今後1年間の製作の展望についてまとめた成果発表会を行いました。さまざまな場面で、東京大学と福井大学からお招きした講師の方々、および各協力企業のサポートスタッフの方々に直接指導していただきました。講座には42名(11校)が参加しました。
1日目
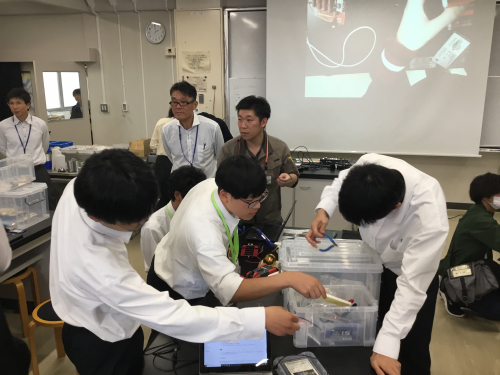
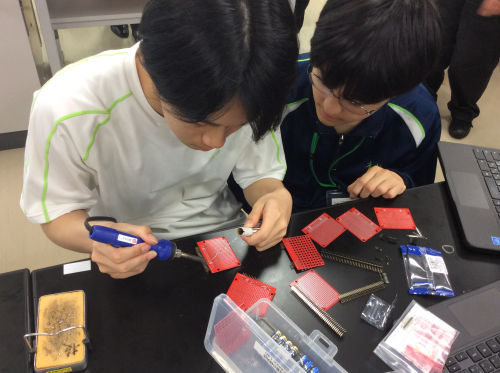
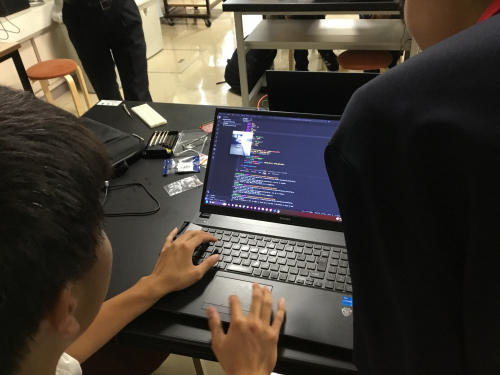
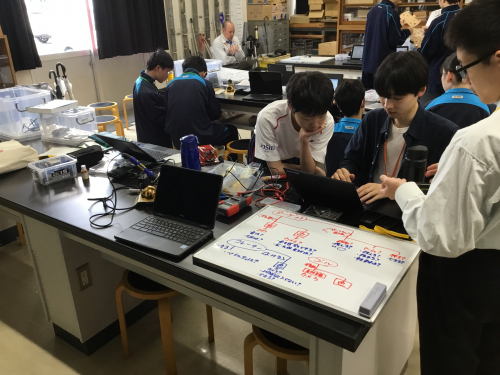
最初に、宇宙分野で最前線に立って開発を進めている東京大学の中須賀教授から、「超小型衛星による宇宙開発への挑戦とAI・ロボット」というタイトルで講義がありました。その後、ローバー製作グループとプログラム作成グループに分かれて、製作作業とプログラム講習がスタートしました。ローバー製作グループは電子基板にマイコンやセンサー、電子部品などをはんだづけしていき、モーターなども接続してローバーの構造を作り上げていきました。プログラム作成グループは、電子プログラムの基礎的な仕組みに関する講習を受け、その後自分たちでプログラムコードを変えながら、電子プログラムの内容を理解していきました。わからないところは企業サポートスタッフの方々が丁寧に解説してくださり、疑問を解決することができました。初めて体験する製作、実習内容が多かったのですが、みな試行錯誤しながら積極的に活動に取り組んでいました。


2日目
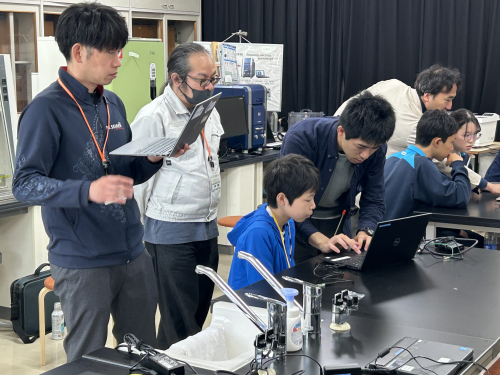
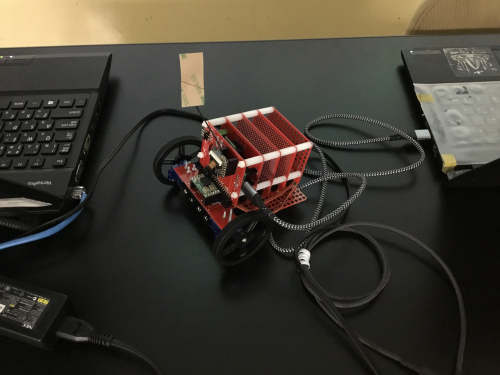
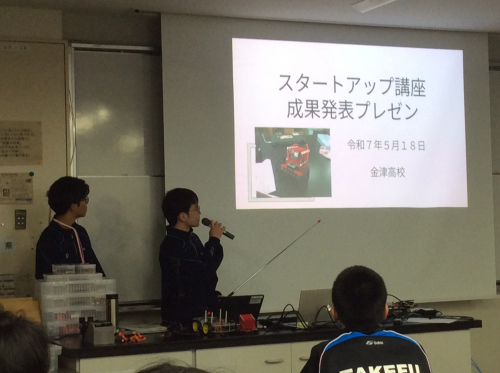
まず始めに、3月の最終コンテストでのコース設定が発表されました。各チームは、発表された模擬火星地表面でのコンテストコースをイメージしながら、ローバー製作を進めました。ローバー製作が完了したチームから、無線通信でPCからローバーを遠隔操作するという電子プログラムをマイコンに書き込み、動作確認を行いました。正常な動作が確認できなかったチームは、電子プログラムや電子回路配線の見直しを行い、修正して、動作を再確認しました。はんだづけの大幅な修正が必要になったチームもあり、企業サポートスタッフの方々の多大な協力をいただきながら、修正をしていきました。正常な動作が確認できたチームは、自分たちの製作したローバーが電子プログラムの通りに動作する様子に歓声を上げていました。チームによっては、電子プログラムを自分たちで独自にアレンジしていき、カメラで取得した画像データをもとに物体認識をするローバーを作ったチームなどもありました。ローバーの動作確認をした後は、各チームが今後1年間で達成を目指すミッションを定めていきました。最後に行った成果発表会では各チームが、模擬火星地表面のコンテストコースでサンプル採取を目指すミッションや、色認識を利用して進入禁止区域を避けて通るミッションなどをプレゼンしました。

受講生からは、「自分でミッションを設定してそれをどのように実現するのかを追求していく過程が楽しかった。プログラムが思い通りに動いたときの達成感も大きかった。」「はんだづけやプログラミングなど、あまり高校の授業で触れていないことだったが、講師の方々や企業サポートスタッフの方々に直接ご指導いただいたおかげで、楽しく2日間を終えることができました。私達の設定した目標が達成できるよう、今日学んだことを活用し、学校に戻ってからも頑張りたいと思いました。」「非常に楽しく、有意義な講座をありがとうございました!」などの感想が得られました。
福井県教育総合研究所 サイエンスラボ
お問い合わせ 0776-58-2170
